robot end effector pdf
Revolute 1 DOF Prismatic 1 DOF 6 parameters 3 positions 3 orientations Generalized Coordinates n 1 dof. Robot End-effector is classified into four general types based on physical effect usage to achieve a stable grasp amongst the gripper and the object to be grabbed.
What S The Difference Between Industrial Robots Machine Design
Overload Protection When some unexpected event happens to the end effector such.
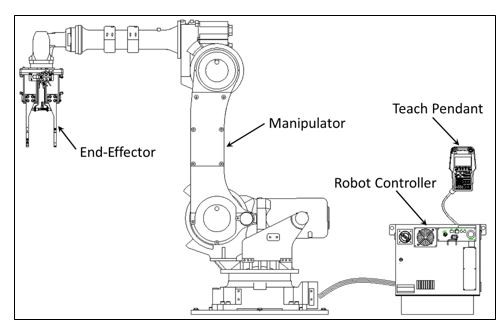
. Motion of the robot end-effector. Have students think of a job that an end effector could do and design an end effector for the job. However a robot arm alone can hardly accomplish any job.
This is why each manufacturing robot needs an end effector. Of Grenoble France in 2001 and 2005 respectively. The part of the robotic arm that grabs objects is called an end effector This wire-snare device is designed to fit over special grapple fixtures knobbed pins on the Shuttle ISS and ISS.
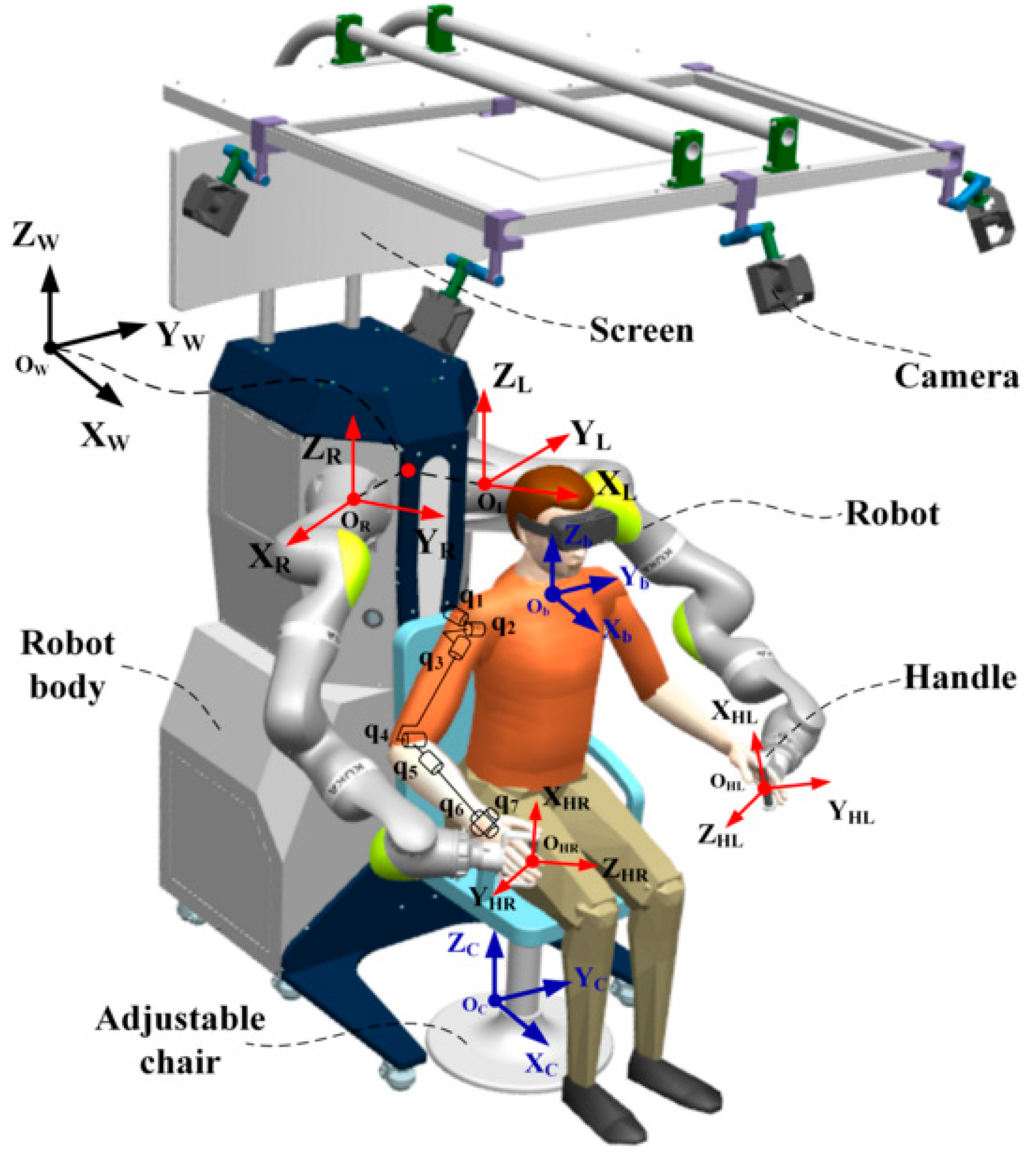
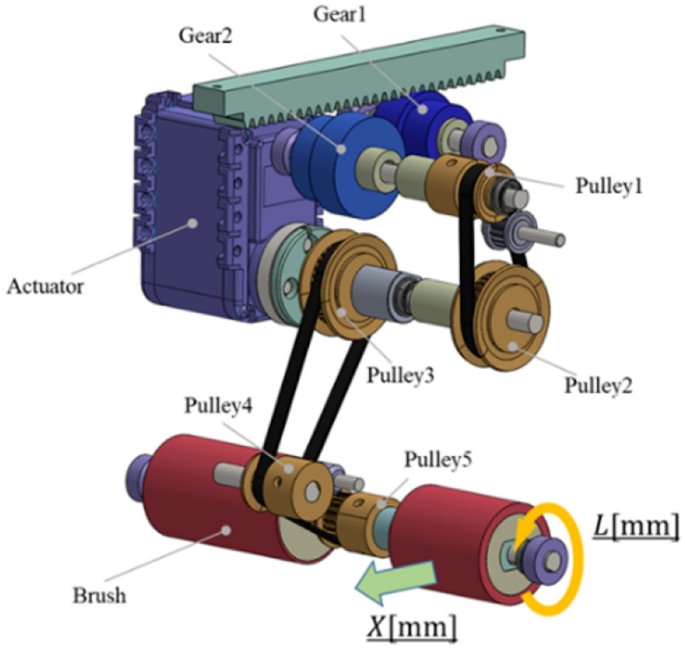
View 18602_Robot End-Effectorpdf from MEC 282 at Lovely Professional University. The end-effector for the robot has been actively controlled by two electric motors using mechanical impedance. View ROBOT END EFFECTORS LECTURE pdf from DATA STRUC CS205 at Accra Polytechnic.
This activity demonstates how an end effector is constructed to resemble a. By definition an end effector is the device at the end of a robotic arm. When some unexpected event happens to the end effector such.
19 designed a robotic cotton harvester with a prebuilt rover as the platform in which a suction type end-effector was used with rotating gears at the tip to grasp the seed cotton. Ahmed Chemori received his MSc. While for passive force control 16 17 a passively compliant end.
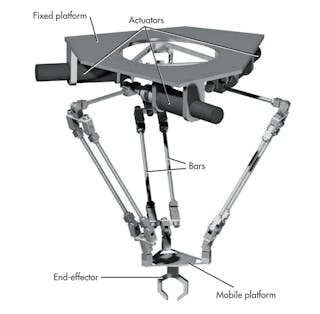
These are mounted on the end of the 3-dof translational robot arms to form serial robots with translational and rotational capability. Up to 3 cash back ROBOTEND EFFECTOR INTERFACE Physical support during the work cycle 3Overload Protection. Spot welding spray painting etc.
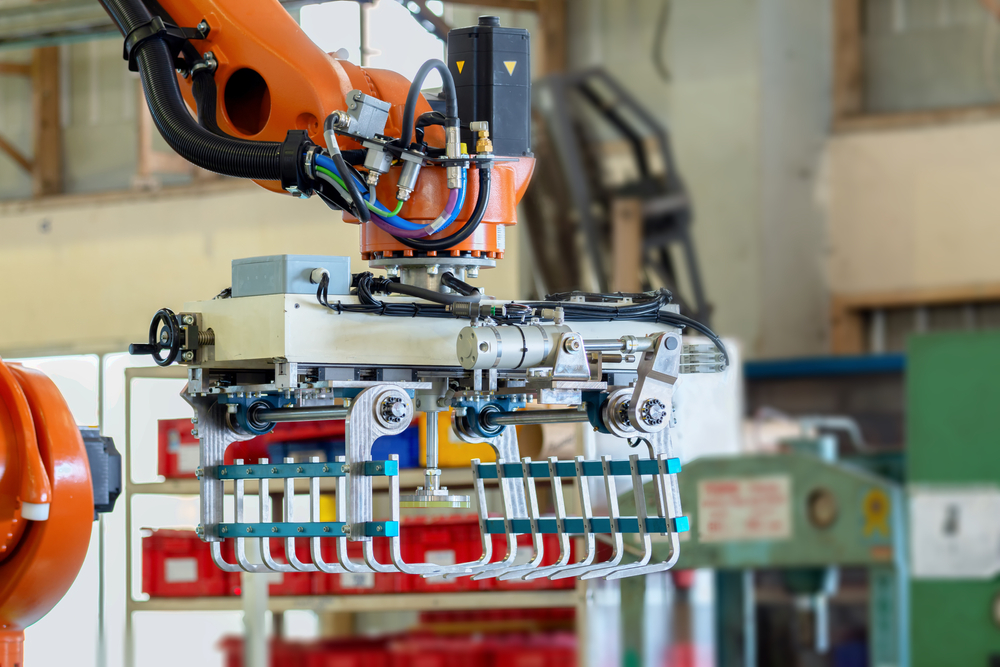
Up to 3 cash back ROBOTEND EFFECTOR INTERFACE Physical support during the work cycle 3. AUTOMATION AND ROBOTICS BCS 419 INTRODUCTION TO ROBOT AND END EFFECTORS. Tools End effectors designed to perform work on the part rather that to merely grasp it.
Robot End - Effectors End-Effectors can be defined as a device which is attached to the robots wrist to. The Robotic Tool Changer brings flexibility to robot applications by allowing the robot to change end-effectors eg grippers vacuum cup tooling pneumatic and electric. Note I write primary.
Degrees both in automatic control from Polytechnic Institute. End-Effector n moving link 1 fixed link Links.

Anthropomorphic Soft Robotic End Effector For Use With Collaborative Robots In The Construction Industry Sciencedirect

Robot End Effector Wikiwand

Mate Doosan Robotics
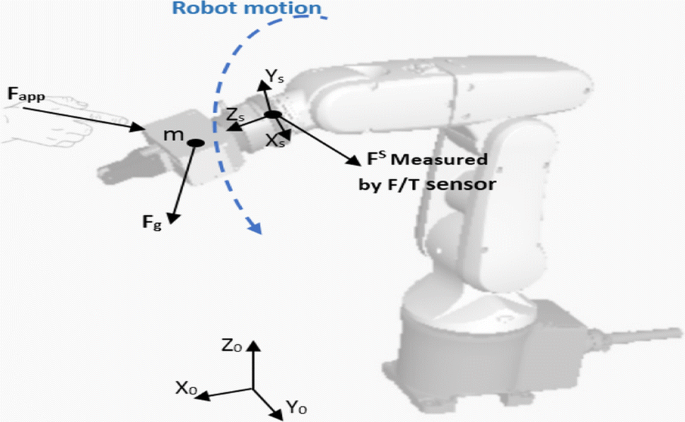
Online Teaching Of Robotic Arm By Human Robot Interaction End Effector Force Torque Sensing Springerlink

Choosing The Right End Effector
Robot Grippers And End Effectors Uses Benefits And Cost Analysis Howtorobot

Robot End Effector Pdf Robotics Robot
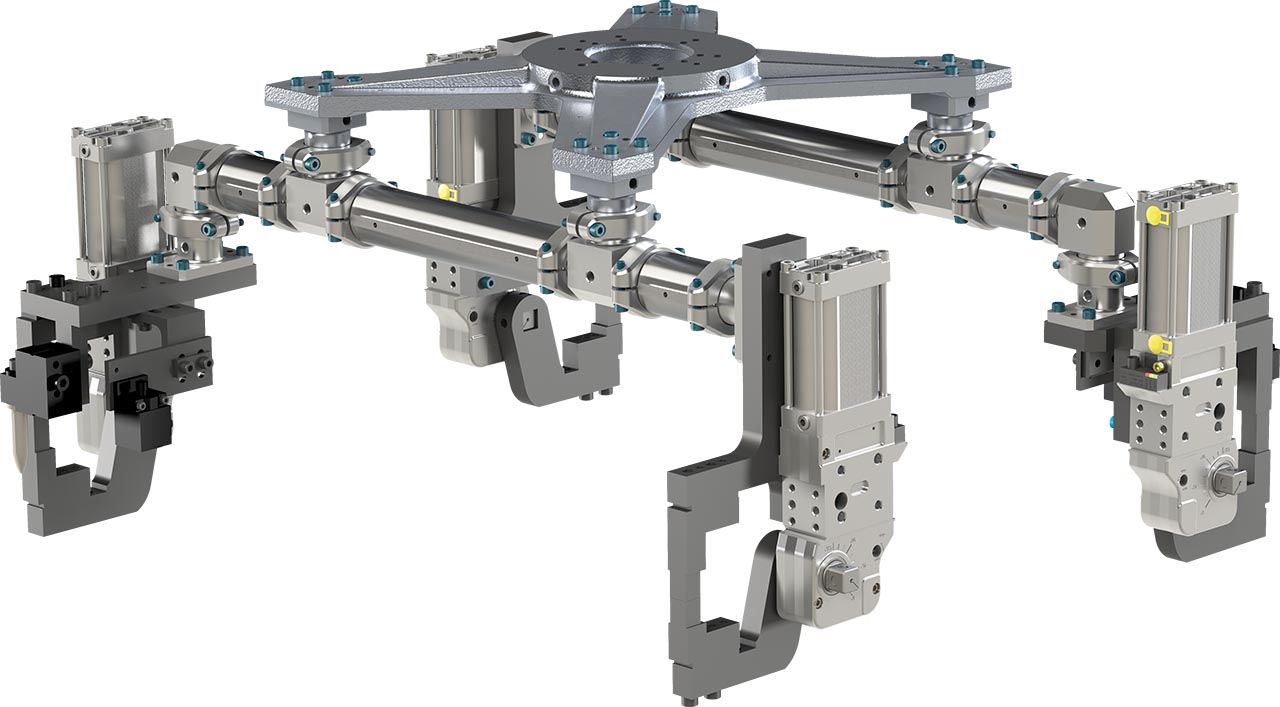
Spidergrip Geometric Tooling Family
Osha Technical Manual Otm Section Iv Chapter 4 Occupational Safety And Health Administration

Pdf Development Of Robotic End Effector Using Sensors For Part Recognition And Grasping

Procobots
Me405 510 Introduction To Robotics Homework 7 Due Chegg Com

Case Study Dmg Mori Redesigns Robotic End Effector
Applied Sciences Free Full Text Development And Assist As Needed Control Of An End Effector Upper Limb Rehabilitation Robot
A Robotic End Effector With Rolling Up Mechanism For Pick And Release Of A Cotton Sheet Robomech Journal Full Text

Dbg Bag Gripper Section De Sta Co Pdf Catalogs Technical Documentation Brochure

Pdf Dynamic Characteristics Of The End Effector Of A Drilling Robot For Aviation Semantic Scholar
Lego Moc Six Axis 6dof Robotic Arm With Interchangeable End Effectors By Gubsters Rebrickable Build With Lego

Pin On 3d Design Drawings